Przed przystąpieniem do tworzenia aplikacji paletyzacji zachęcamy do zaznajomienia się z artykułami wprowadzającym do konfiguracji robotów UR „Konfiguracja parametrów instalacyjnych robota UR” oraz „Pierwszy program w robocie UR: aplikacja Pick&Place”.
W poprzednich artykułach wyjaśniliśmy w jaki sposób zrealizować z wykorzystaniem robota podstawowe zadania, wymagające jedynie kilku ruchów. Jednak co w przypadku, jeśli robot ma zostać wykorzystany np. do automatyzacji procesu paletyzacji? Dla tego zadania oraz kilku innych skomplikowanych operacji (pobieranie ze stosu, śledzenie taśmociągu, działanie z wykorzystaniem siły) producent przewidział specjalne kreatory, które krok po kroku przeprowadzają użytkownika przez proces parametryzacji. Z pewnością, pozwala to na zmniejszenie czasu potrzebnego na zaprogramowanie robota oraz ułatwia jego wdrożenie.
Pozycja początkowa
Pierwszym krokiem jest dodanie sekwencji startowej, która zostanie wykonana jednorazowo przy uruchomieniu programu. Będzie to przejazd robota do pozycji StartPosition.
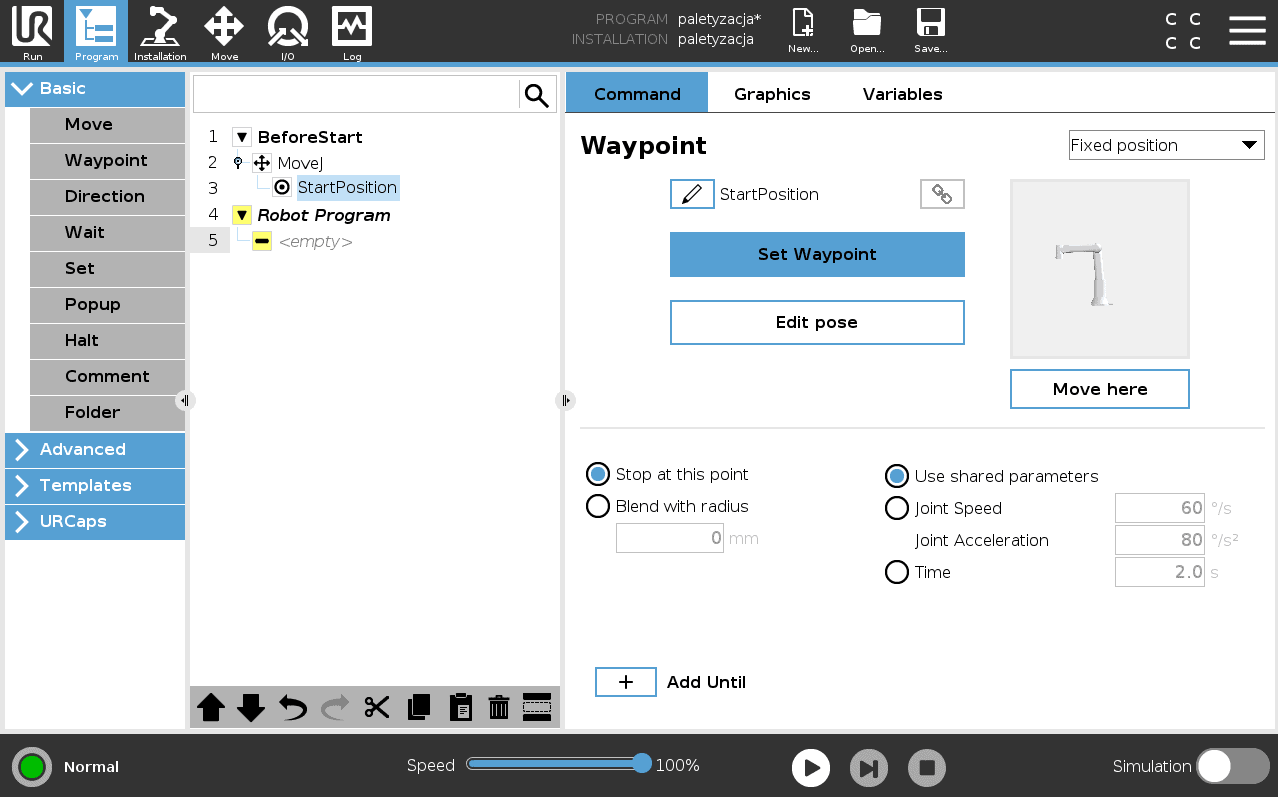 Rys. 1 Ustawienie pozycji początkowej
Rys. 1 Ustawienie pozycji początkowej
 Rys. 2 Pozycja Start
Rys. 2 Pozycja Start
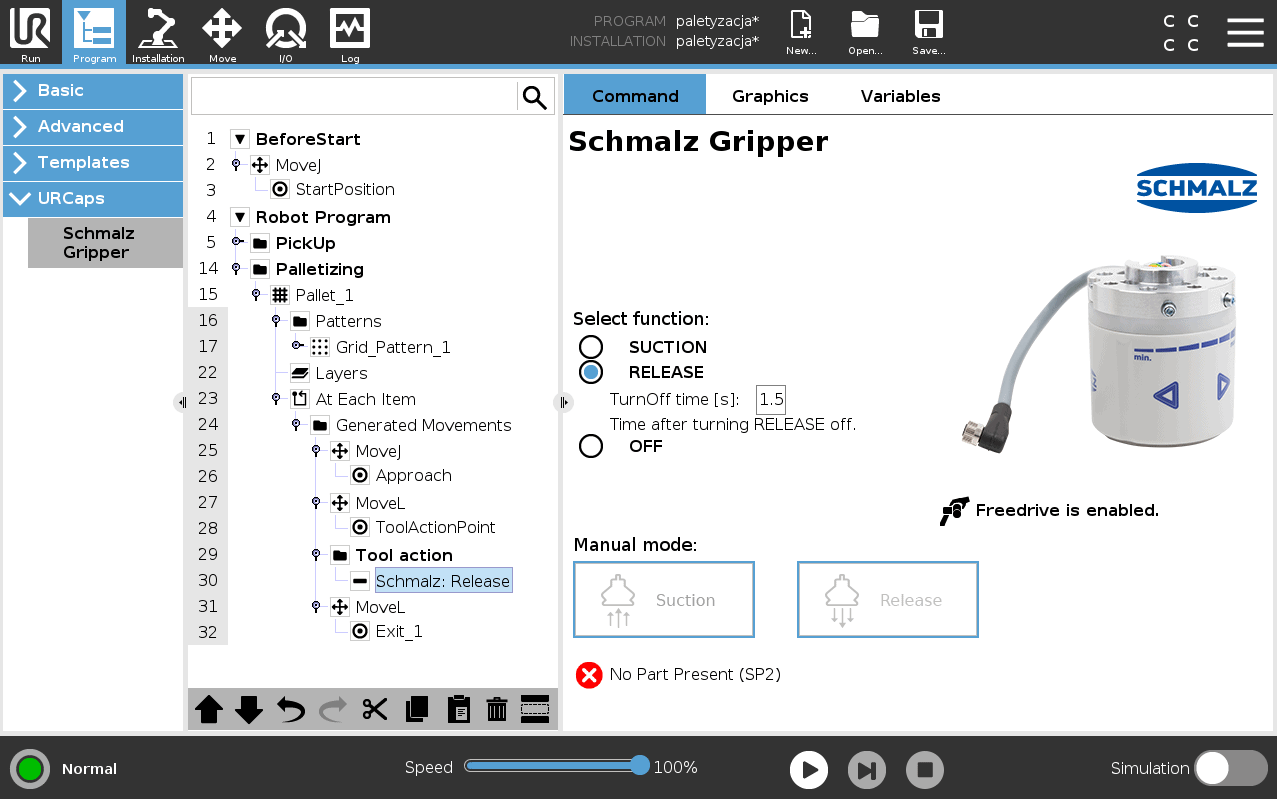
Obsługa chwytaka
Przed przejściem do dalszej części programu, przedstawiona zostanie funkcjonalność jednego z chwytaków, umożliwiających paletyzację - Schmalz ECBPM. Jego parametryzacja odbywa się z poziomu URCaps – dedykowanego dodatku, przygotowanego przez producenta chwytaka, który umożliwia konfigurację chwytaka i załączanie jego funkcji bezpośrednio w środowisku PolyScope. Następnie, po zainstalowaniu URCaps, w zakładce Installation pojawi się dodatkowe okno, pozwalające na konfigurację chwytaka.
Istnieje możliwość wybrania aktualnie zamontowanego chwytaka oraz ręcznego przetestowania jego funkcji. W tym miejscu przedstawione są także dodatkowe informacje dotyczące narzędzia. Możliwość ręcznej konfiguracji poziomu próżni oraz instrukcja załączania trybu Freedrive poprzez ściśnięcie chwytaka.
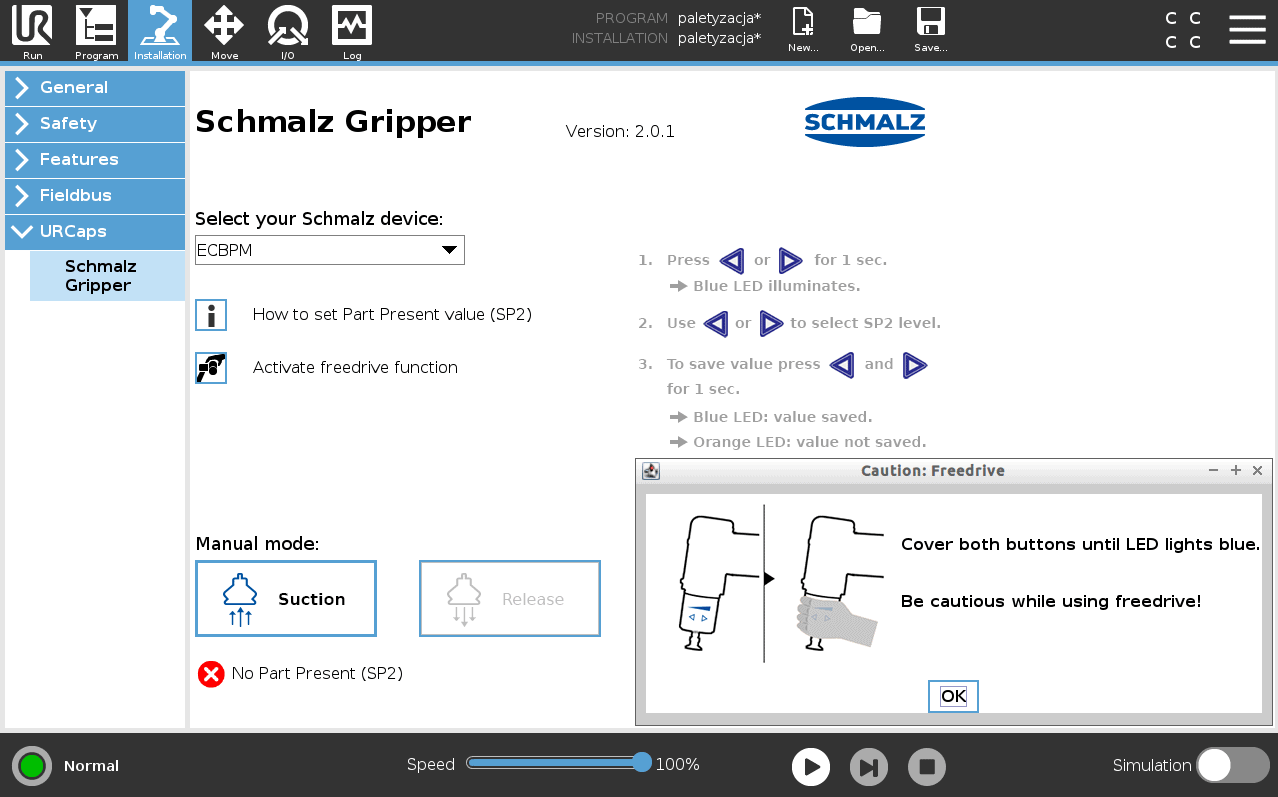 Rys. 3 URCaps chwytaków firmy Schmalz
Rys. 3 URCaps chwytaków firmy Schmalz
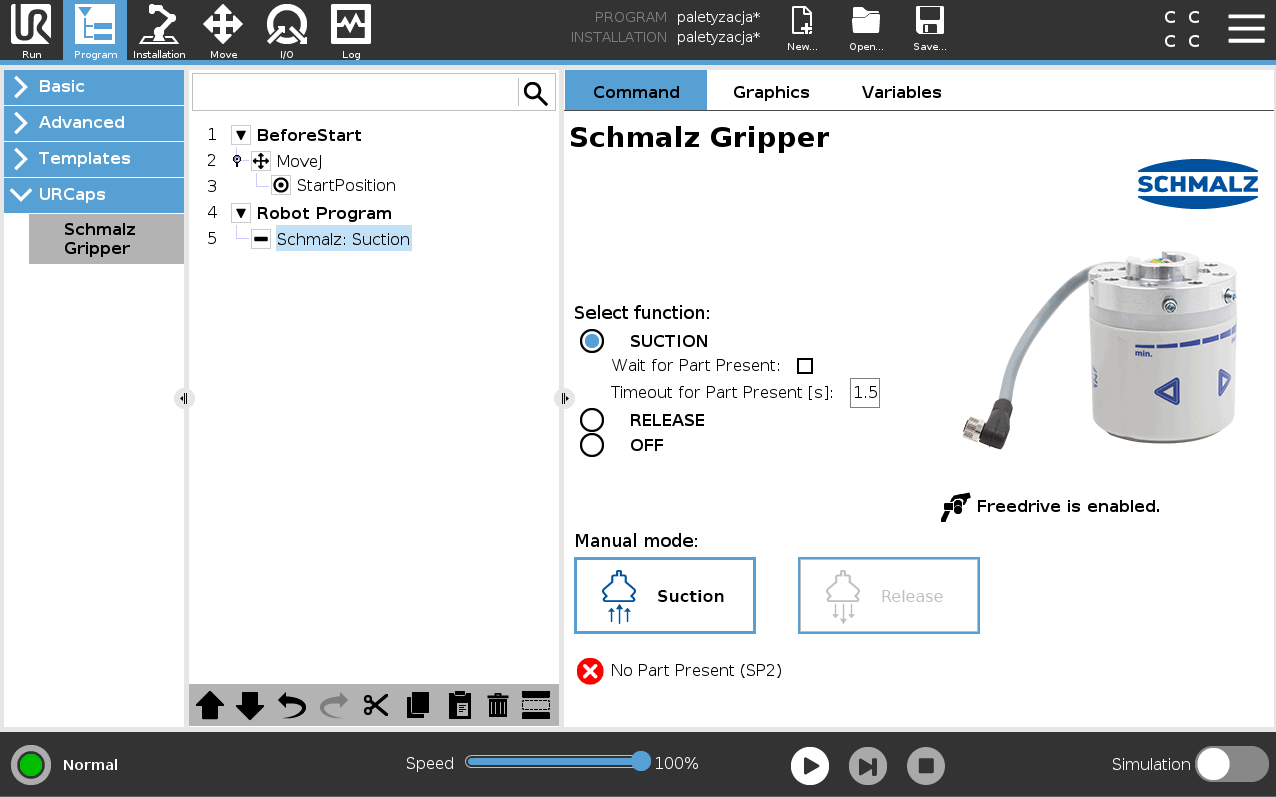 Rys. 4 Funkcje chwytaka ECBPM
Rys. 4 Funkcje chwytaka ECBPM
Pobranie kartonu
Pierwszą sekwencją, cyklicznie powtarzaną przy paletyzacji jest pobieranie kartonu ze wskazanego pola (w rzeczywistej aplikacji byłby to koniec taśmociągu, bądź dedykowany obszar maszyny). Z menu po lewej stronie należy dodać do programu nowy folder, zmienić jego nazwę np. na „PickUp”, a następnie wewnątrz kolejno dodać funkcje:
- ruch przegubowy do pozycji:
- wyjściowej do paletyzacji (MiddlePos),
- nad kartonem (OverTheBoxPos),
- ruch liniowy pionowo w dół do punktu, w którym ssawka dotyka kartonu (BoxPos),
- pobranie kartonu (załączenie funkcji Suction chwytaka ECBPM)
- ruch liniowy pionowo w górę do pozycji OverTheBoxPos,
- ruch przegubowy do pozycji wyjściowej do paletyzacji (MiddlePos).
 Rys. 5 Pozycja OverTheBoxPos, BoxPos i MiddlePos
Rys. 5 Pozycja OverTheBoxPos, BoxPos i MiddlePos
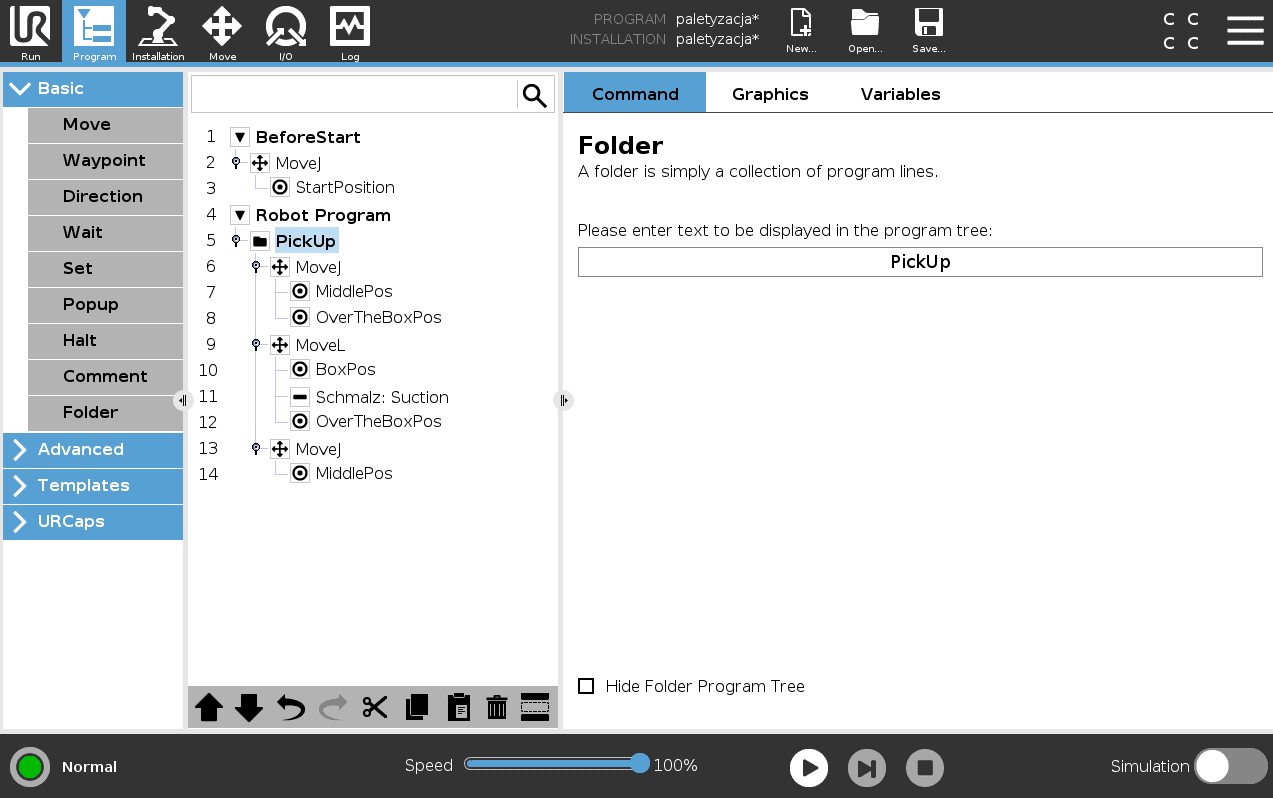 Rys. 6 Program z gotową sekwencją pobierania kartonu
Rys. 6 Program z gotową sekwencją pobierania kartonu
Paletyzacja
Kolejnym krokiem jest dodanie pełnej sekwencji paletyzacji. Należy utworzyć nowy folder i z menu Structures po lewej stronie wstawić do niego wzorzec paletyzacji (Templates >> Palletizing).
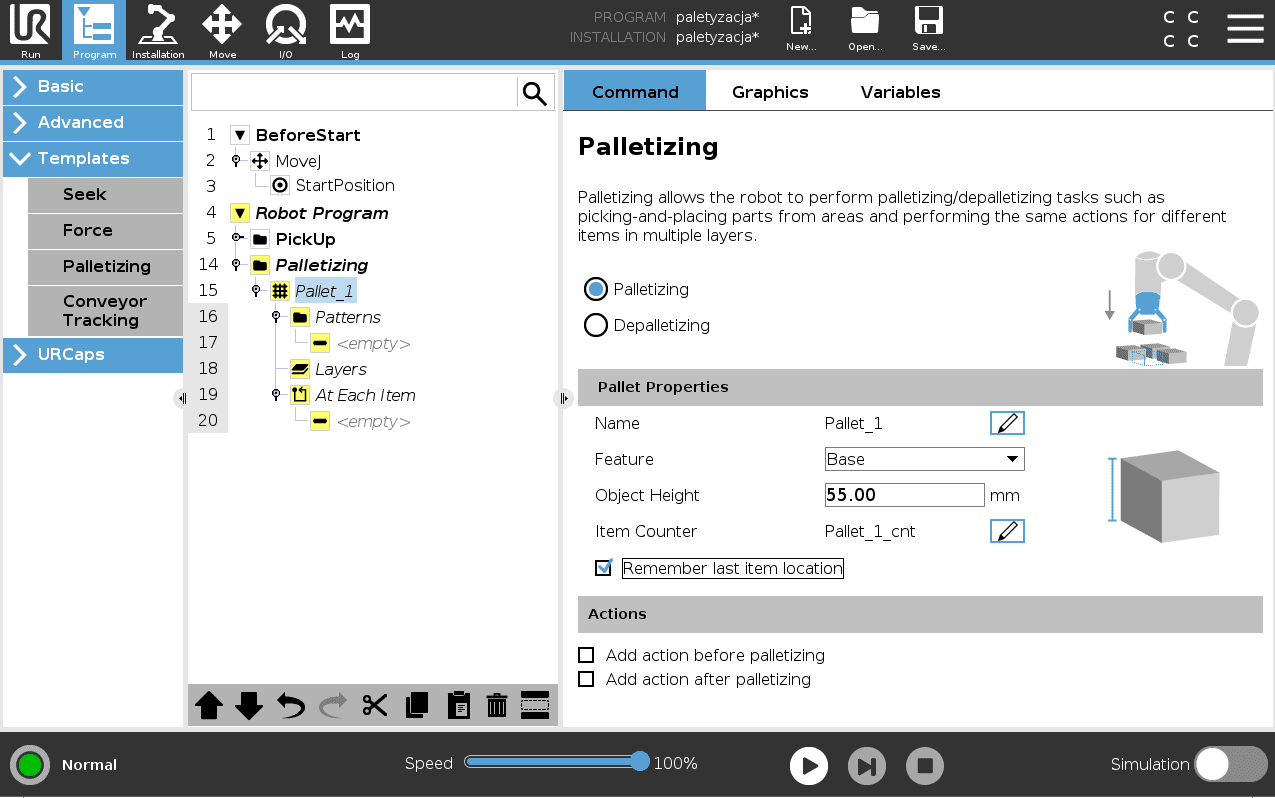 Rys. 7 Kreator paletyzacji
Rys. 7 Kreator paletyzacji
W pierwszej kolejności należy określić wykonywaną przez robota operację – paletyzację (pobieranie kartonów z jednego miejsca i odkładanie ich na paletę) lub depaletyzację (pobieranie kartonów z palety i odkładanie ich do wskazanego miejsca).
Właściwości palety i akcje:
- Name – unikalna nazwa palety, z którą związane będą nazwy tworzonych zmiennych.
- Feauture – układ odniesienia względem, którego będzie możliwa parametryzacja procesu paletyzacji – Umożliwia zmianę układu współrzędnych, w którym wskazuje się miejsce położenia palety. Wykorzystuje się to, gdy paleta nie znajduje się za każdym razem w tym samym miejscu względem robota i pomiar jej położenia wykonywany jest np. dalmierzem lub kamerą.
- Object Height – wysokość kartonu, istotne jest podanie poprawnej wartości, ponieważ na jej podstawie wyliczane będzie odkładanie kartonów w kolejnych warstwach.
- Item Counter – licznik odkładanych elementów. Możliwe jest uzależnienie realizacji programu np. od parzystości odkładanych kartonów lub przekazanie informacji operatorowi, gdy robot wykonuje paletyzację ostatniej warstwy.
- CheckBox:
- Remember last item location – zaznaczenie pola powoduje, że nawet po zatrzymaniu programu robot zapamiętuje ostatnią wartość licznika i po uruchomieniu programu kontynuuje paletyzację od tego miejsca.
- Add action before palletizing – zaznaczenie pola umożliwia dodanie dodatkowej sekwencji przed rozpoczęciem paletyzacji (np. załączenie taśmociągu transportującego pustą paletę na miejsce paletyzacji)
- Add action after palletizing – zaznaczenie pola umożliwia dodanie dodatkowej sekwencji po zakończeniu paletyzacji (np. uruchomienie owijarki, załączenie kontrolki sygnalizującej konieczność wymiany palety)
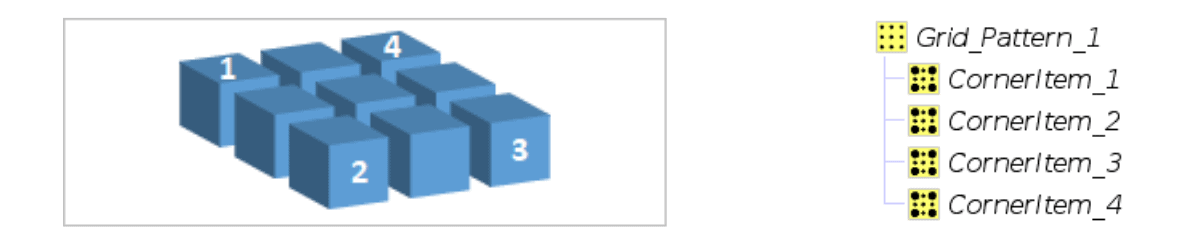
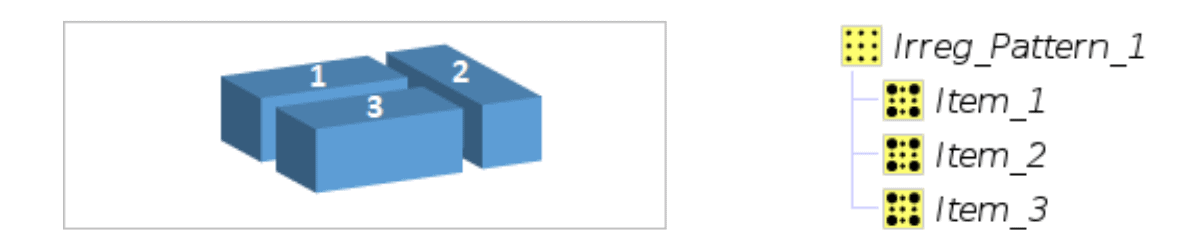
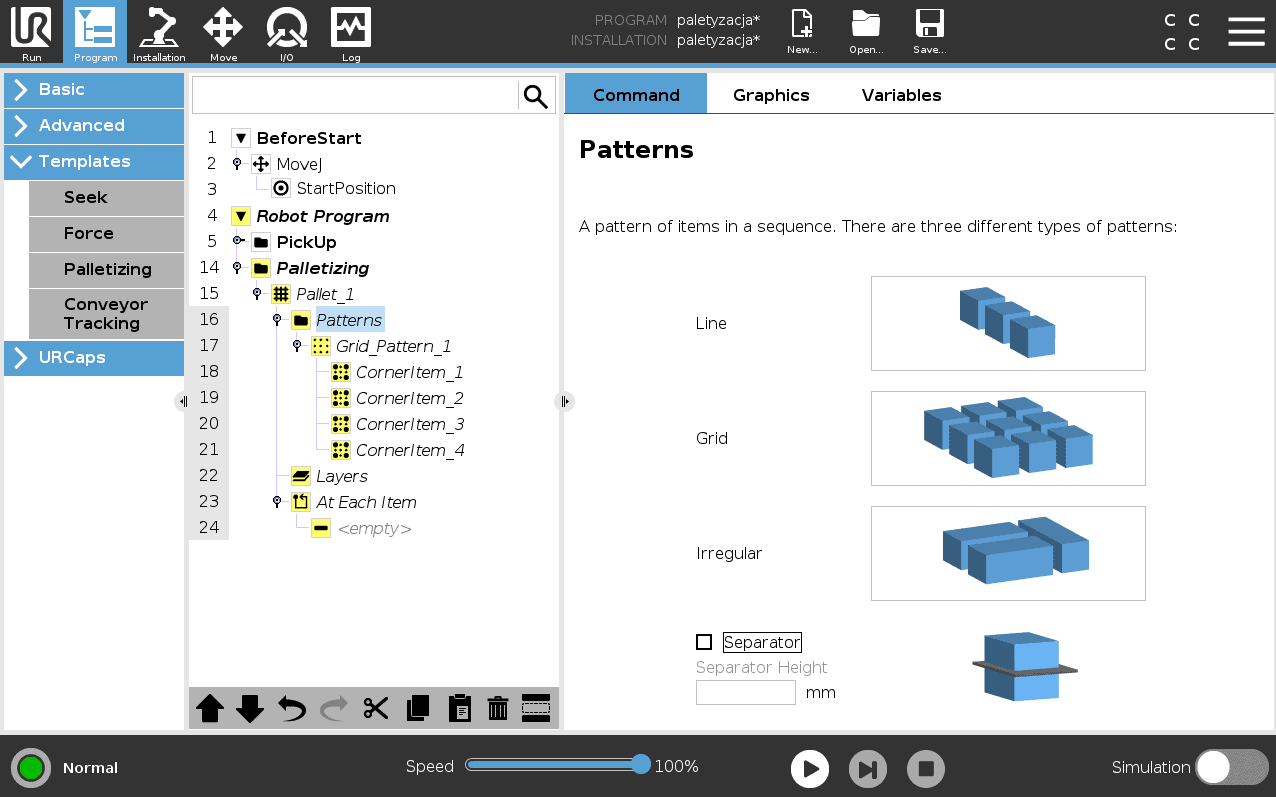 Rys. 8 Wzory paletyzacji
Rys. 8 Wzory paletyzacji
Wzory paletyzacji
Do wyboru jest jeden z trzech predefiniowanych wzorów paletyzacji:
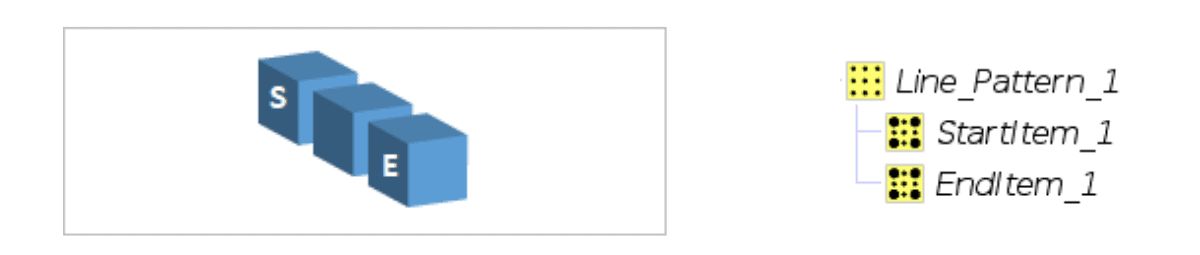
- Line – paletyzacja wzdłuż linii. Należy zdefiniować położenie pierwszego (StartItem - S) i ostatniego (EndItem - E) elementu na palecie, program na podstawie podanej całkowitej liczby elementów określa położenie poszczególnych kartonów pomiędzy zdefiniowanymi.
- Grid – paletyzacja na planie siatki. Należy podać pozycję 4 narożników, ilość wierszy (elementy pomiędzy narożnikami 1 i 2) oraz ilość kolumn (elementy pomiędzy narożnikami 1 i 4).
- Irregular – paletyzacja niestandardowa. W związku z tym, należy określić każdy punkt, do którego będzie miał zostać odłożony karton. Kolejność paletyzacji będzie zgodna z kolejnością punktów w programie.
Ponadto, w tym miejscu można także zadeklarować wykorzystanie separatora. Następnie, po zaznaczeniu dedykowanego pola należy podać grubość (wysokość) przekładki. W programie pojawią się wtedy także dodatkowe foldery pozwalające na dodanie sekwencji pobrania i odkładania przekładki.
W przykładzie nie zastosujemy przekładki, a każda warstwa palety będzie składała się z 6 kartonów ułożonych w 2 wiersze i 3 kolumny. Przede wszystkim, konieczne jest zapisanie pozycji każdego narożnika.
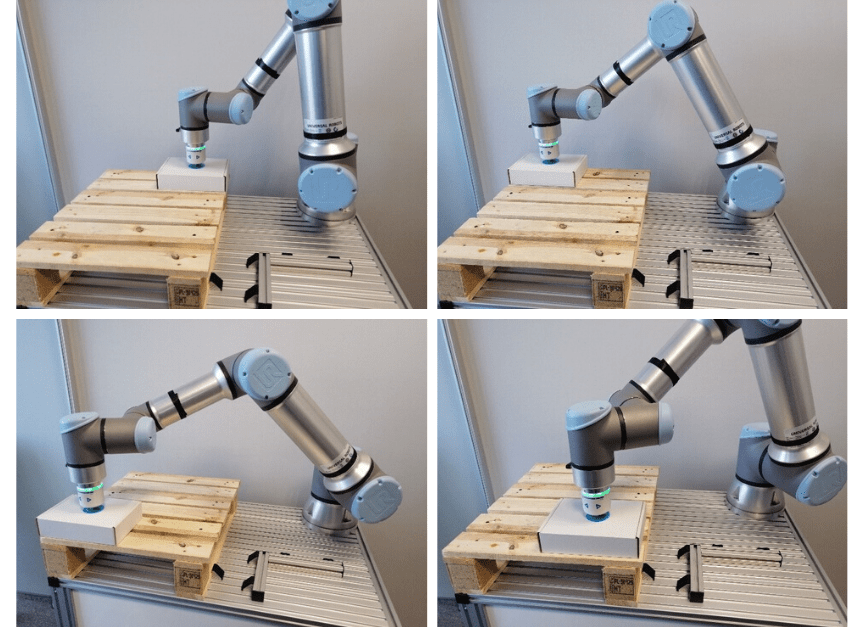 Rys. 9 Pozycje CornerItem
Rys. 9 Pozycje CornerItem
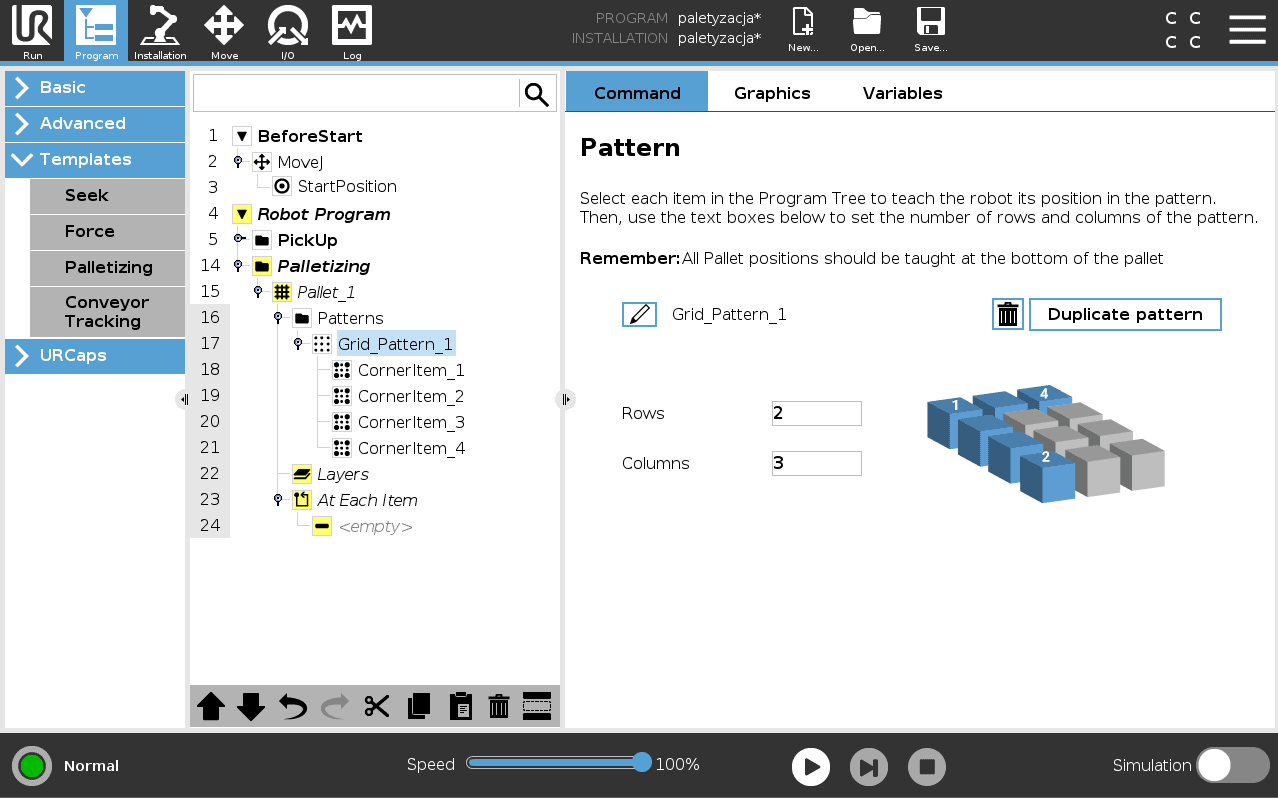 Rys. 10 Ustawienia wzoru Grid
Rys. 10 Ustawienia wzoru Grid
Warstwy
Następne okno kreatora umożliwia określenie wzoru paletyzacji dla każdej warstwy. Wybór jest niezależny i każda warstwa może charakteryzować się innym wzorem. Ponadto, można określić po której z warstw ma zostać nałożony separator. Paleta będzie się składać z dwóch warstw, każda zgodna ze wcześniej zdefiniowanym wzorem Grid_Pattern_1.
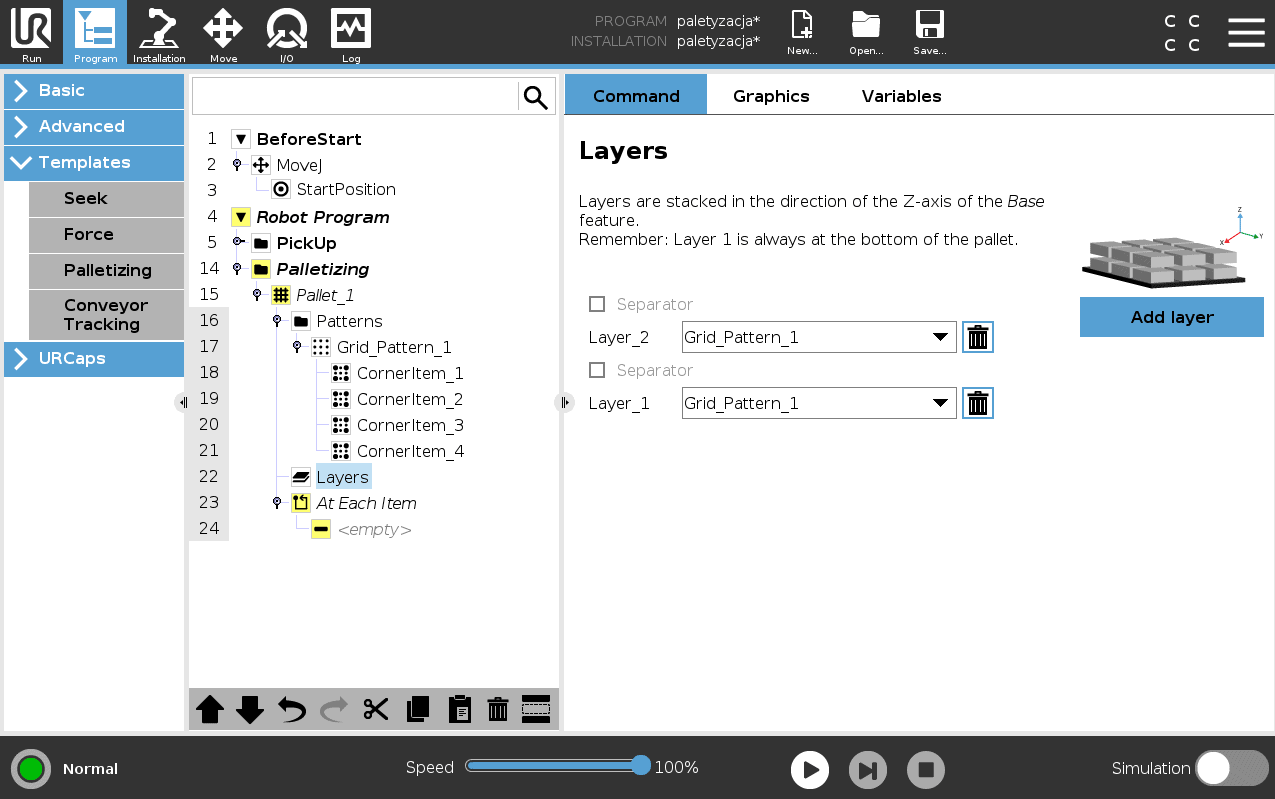 Rys. 11 Ustawienia warstw
Rys. 11 Ustawienia warstw
Odkładanie kartonu
Proces odkładania kartonu można zdefiniować z wykorzystaniem dedykowanego asystenta. Podobnie jak przy automatycznym obliczaniu obciążenia i CoG, kreator prosi o przejazd do kolejnych pozycji. Pracę z asystentem rozpoczyna się w narożniku pierwszym „ToolActionPoint”. Dla niego określa się punkt podjazdu z kartonem do miejsca odłożenia „Approach”, a także ścieżkę odjazdu robota po odłożeniu kartonu na paletę „Exit” . Asystent automatycznie wyznaczy analogiczne ruchy dla wszystkich pozostałych punktów, do których odkładane będą kartony.
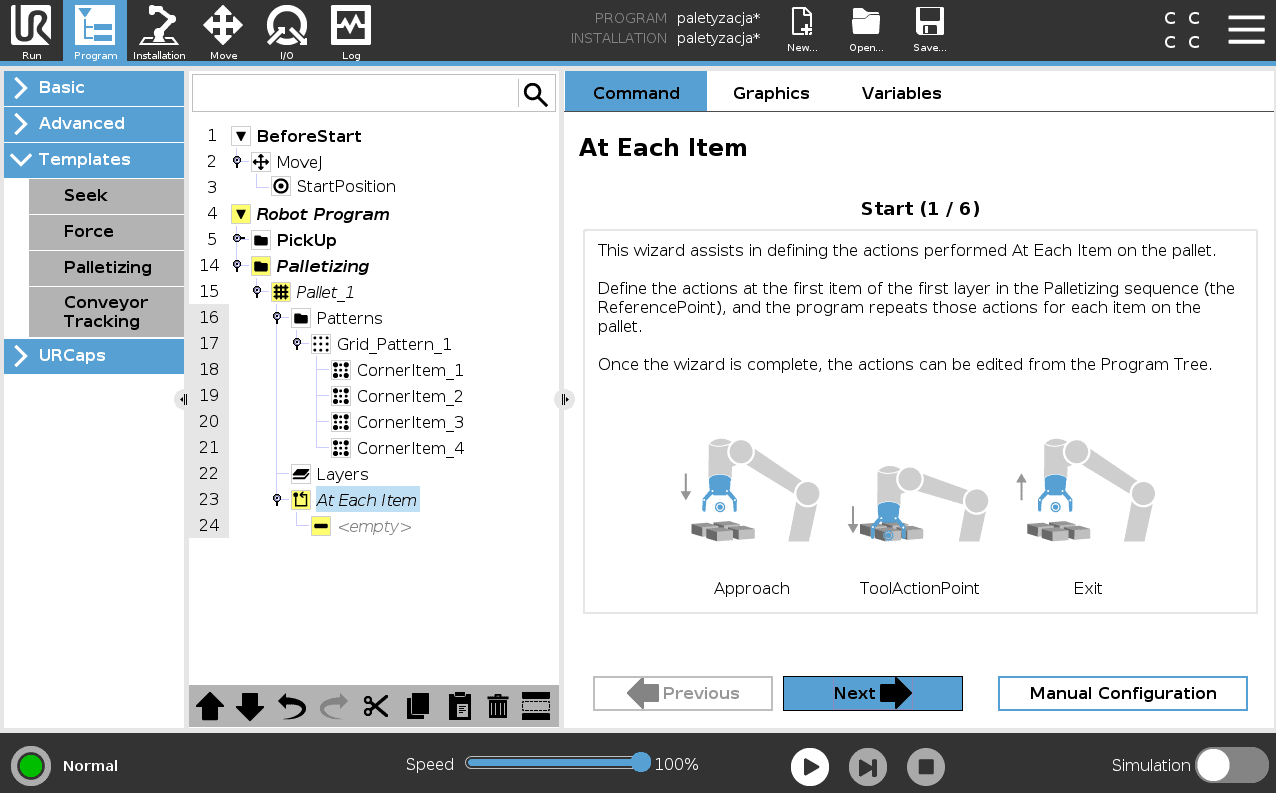 Rys. 12 Kreator podjazdu i odkładania kartonów
Rys. 12 Kreator podjazdu i odkładania kartonów
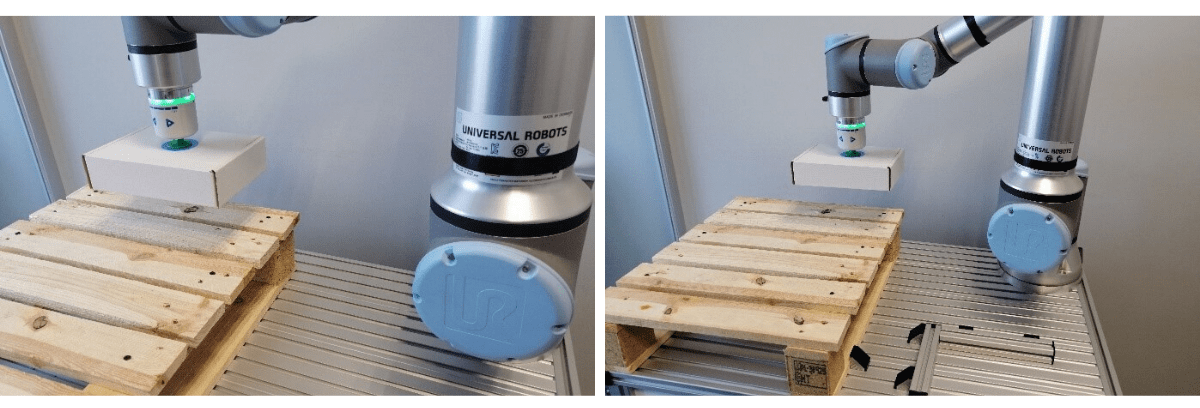 Rys. 13 Pozycja Approach i Exit
Rys. 13 Pozycja Approach i Exit
Po zakończeniu pracy z kreatorem należy dodać akcje odkładania kartonu w folderze Tool action.
 Rys. 14 Ukończony program paletyzacji
Rys. 14 Ukończony program paletyzacji
Podsumowując, program jest gotowy!
Poniższe przykłady zostały opracowane w wersji Polyscope v5.8.
Autor dołożył wszelkich starań, aby informacje przedstawione w opracowaniu były kompletne i rzetelne. Nie ponosi jednak żadnej odpowiedzialności ani za ich wykorzystanie ani za szkody spowodowane ewentualnymi błędami.
Występujące w tekście zastrzeżone znaki firm są zastrzeżonymi znakami firmowymi bądź towarowymi ich właścicieli.
Żadna część tej pracy nie może być powielana i rozpowszechniana w jakiejkolwiek formie i w jakikolwiek sposób. Włącznie z fotokopiowaniem lub przy użyciu innych systemów, bez pisemnej zgody autora.