

Zastosowania
- Wewnętrzny transport ładunków
- Automatyzacja logistyki wewnętrznej

Zalety
- Eliminuje wąskie gardła przepływu materiału w celu zwiększenia produktywności
- Optymalizuje wewnętrzny transport ciężkich ładunków i palet oraz umożliwia pracownikom skupienie się na bardziej wartościowych zadaniach
- Manewruje bezpiecznie i efektywnie wokół ludzi i przeszkód nawet w środowiskach o wysokiej dynamice
- Robot ten jest bardzo elastyczny i można zmieniać jego rolę poprzez indywidualnie dostosowane moduły górne
- Przyjazny użytkownikowi interfejs, który można programować nie mając wcześniejszego doświadczenia

Dane techniczne
Ładowność
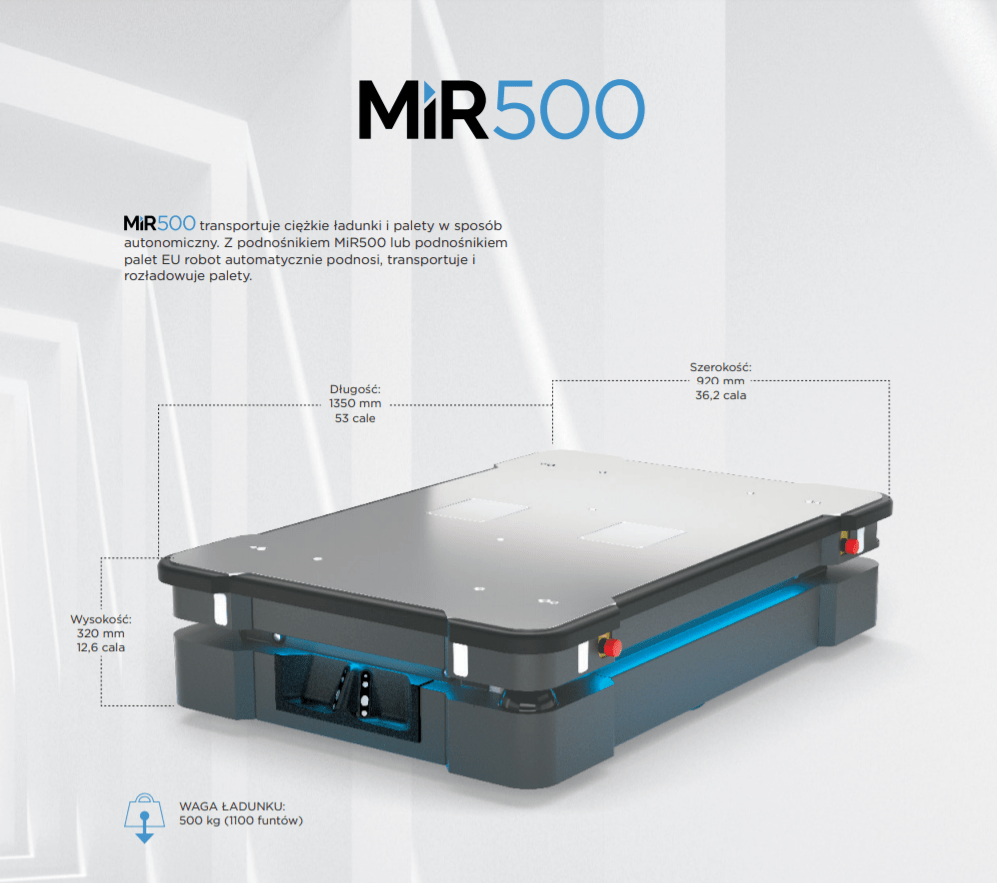
- Ładowność robota 500 kg
Dane techniczne
Wymiary
- Długość: 1350 mm
- Szerokość: 920 mm
- Wysokość: 320 mm
- Wysokość wraz z MiR500 EU Pallet Lift 407 mm
- Wysokość wraz z MiR500 Lift 414 mm
- Masa (bez obciążenia) 230 kg
- Masa wraz z MiR500 EU Pallet Lift 290 kg
- Masa wraz z MiR500 Lift 325 kg
- Prześwit nad podłożem 30 mm
- Średnica koła:
- Koło napędowe: 200 mm
- Koło samonastawne: 100 mm
- Powierzchnia na ładunek 1300 mm x 900 mm
Kierowanie i nawigacja
- Maksymalna prędkość (pełne obciążenie, płaska powierzchnia): 2.0 m/s (7.2 km/h)
- Przyspieszenie (pełne obciążenie, płaska powierzchnia): 1.0 m/s^2
- Maksymalne nachylenie: 5%, przy prędkości 0,5 m/s
- Średnica zawracania: 2000 mm
- Precyzja, dokowanie do markera VL: Pozycja (środek robota): +/- 5 mm. Kąt: +/- 1°.
Akumulator, ładowanie
- Opcje ładowania: MiRCharge 500, ładowarka przewodowa
- MiRCharge 500: Robot ten komunikuje się z ładowarką MiRCharge 500 przez interfejs CAN. Ładowanie rozpoczyna się tylko wtedy, gdy połączenie z robotem jest obecne.
- Ładowarka przewodowa: Podczas ładowania przy pomocy ładowarki przewodowej robot przechodzi w tryb zatrzymania awaryjnego
- Prąd ładowania, MiRCharge 500: 35 A
- Czas ładowania, MiRCharge 500, od 10% do 90%: 1 godzina
- Prąd ładowania, ładowarka przewodowa: 20 A
- Czas ładowania, ładowarka przewodowa, od 10% do 90%: 2 godziny
- Czas aktywnej pracy pomiędzy ładowaniami (w przybliżeniu): 8 godzin
- Czas czuwania: 10 godzin
- Cykle pełnego ładowania, minimum: 700
- Napięcie akumulatora: 48 V
- Pojemność akumulatora: 2 kWh (40 Ah przy 48 V)
Środowisko
- Temperatura otoczenia, podczas pracy: od +5°C do 40°C
- Temperatura otoczenia, podczas przechowywania: od -10°C do 60°C
- Wilgotność: 10-95% bez kondensacji
- Środowisko: Wyłącznie do użytku wewnętrznego
- Klasa IP: IP21
- Woda na podłodze: Może przejeżdżać przez małe kałuże wody na podłodze
Bezpieczeństwo
- Funkcje zabezpieczające: 5 funkcji zabezpieczających zgodnie z ISO 13849-1. MiR500 zatrzymuje się, jeżeli dojdzie do aktywowania funkcji zabezpieczającej
Zgodność i zatwierdzenia
- Normy bezpieczeństwa dla pojazdów przemysłowych: ISO/CD 3691-4, EN1525, ANSI B56.5
- EMC: EN12895, EN61000-6-2, EN61000-6-4
Łączność, WE/WY
- Połączenia WE/WY: 6 wejścia cyfrowe, 6 wyjścia cyfrowe, 1 port Ethernet z protokołem Modbus.
- Połączenie WiFi:
- Router: 2.4 GHz i 5 GHz.
- Adapter WiFi: 2.4 GHz i 5 GHz, 2 anteny wewnętrzne.
- Zasilanie dla modułów górnych: 48 V / 20 A, 48 V SafePWR / 20 A wspólne, 24 V / 2A.
- WiFi: Dwuzakresowa bezprzewodowa AC/G/N/B
Czujniki i kamery
- Skanery laserowe: 2 szt.: SICK microScan 3. FoV: 360° do 30 m na płaszczyźnie i 200 mm na wysokość.
- Kamera 3D: 2 szt.: Intel RealSense D435. FoV: Wykrywa obiekty o wysokości 1700mm w odległości 950 mm z przodu robota. 114° pola widzenia w płaszczyźnie poziomej. Widok podłoża, minimalna odległość od robota: 250 mm.
- Czujniki zbliżeniowe 8 szt.