



Zastosowania
- Pick&Place
- Obsługa wtryskarek
- Obsługa maszyn CNC
- Pakowanie i paletyzacja
- Kontrola jakości
- Montaż
- Polerowanie
- Analizy i testy laboratoryjne
- Klejenie, dozowanie i spawanie
Zalety
- Łatwość programowania
- Szybkie uruchomienie
- Elastyczne
- Bezpieczne i współpracujące
- Szybki zwrot z inwestycji
- Nieograniczone zastosowania
- Łatwo wymienne przeguby
- Wbudowany czujnik siły i momentu
- 17 funkcji bezpieczeństwa
- Pełna zgodność z EN ISO 10218-1, certyfikowana przez TUV NORD
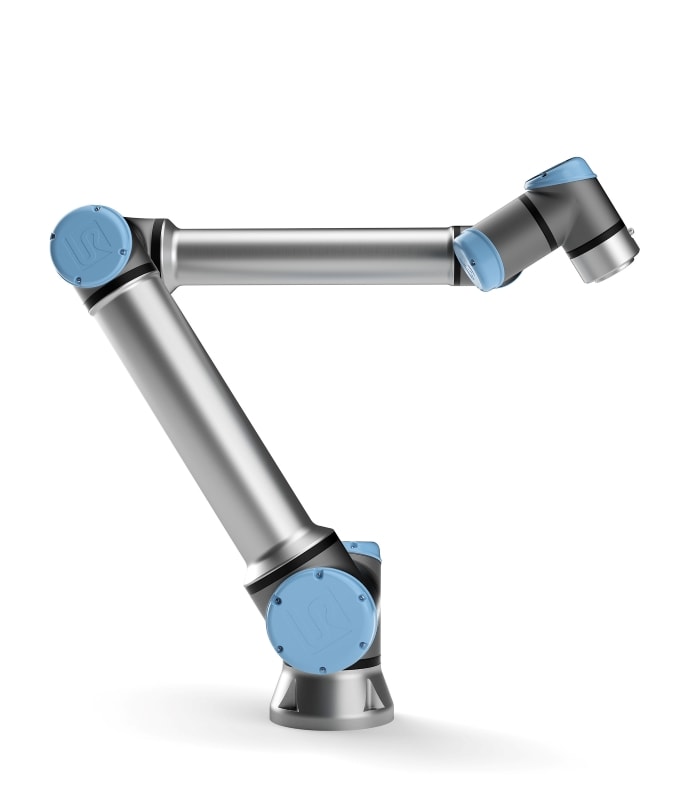
Dane techniczne
Specyfikacja
- Udźwig: 12,5 kg/ 27,5 lb
- Zasięg: 130 cm/51.2 in
- Stopnie swobody: 6 przegubów obrotowych DOF
- Programowanie: Graficzny interfejs użytkownika Polyscope na 12-calowym ekranie dotykowym, do zamontowania