


Zastosowania
- Pick&Place
- Obsługa wtryskarek
- Obsługa maszyn CNC
- Pakowanie i paletyzacja
- Kontrola jakości
- Montaż
- Polerowanie
- Analizy i testy laboratoryjne
- Klejenie, dozowanie i spawanie

Zalety
- Łatwość programowania
- Szybkie uruchomienie
- Elastyczne
- Bezpieczne i współpracujące
- Szybki zwrot z inwestycji
- Nieograniczone zastosowania
- Łatwo wymienne przeguby
- Wbudowany czujnik siły i momentu
- 17 funkcji bezpieczeństwa
- Pełna zgodność z EN ISO 10218-1, certyfikowana przez TUV NORD

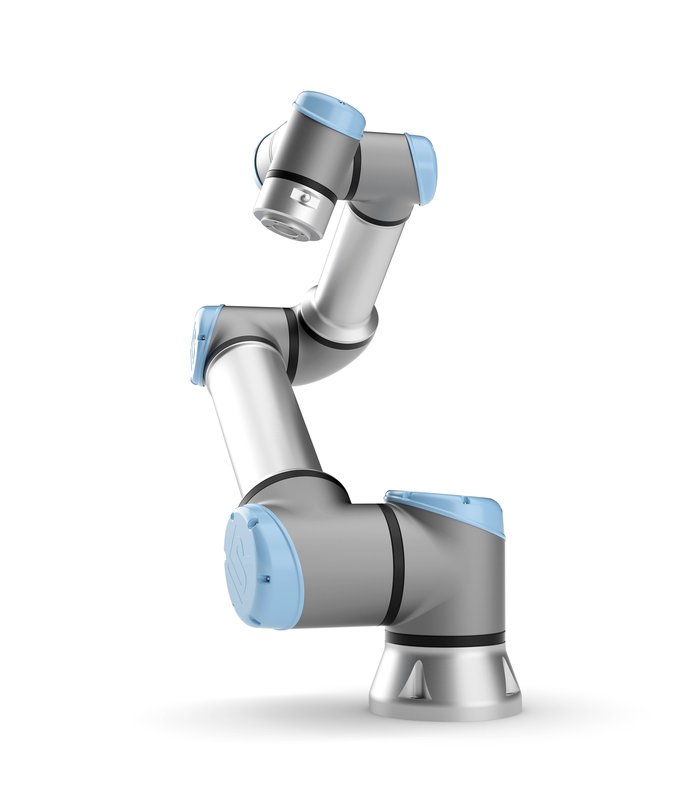
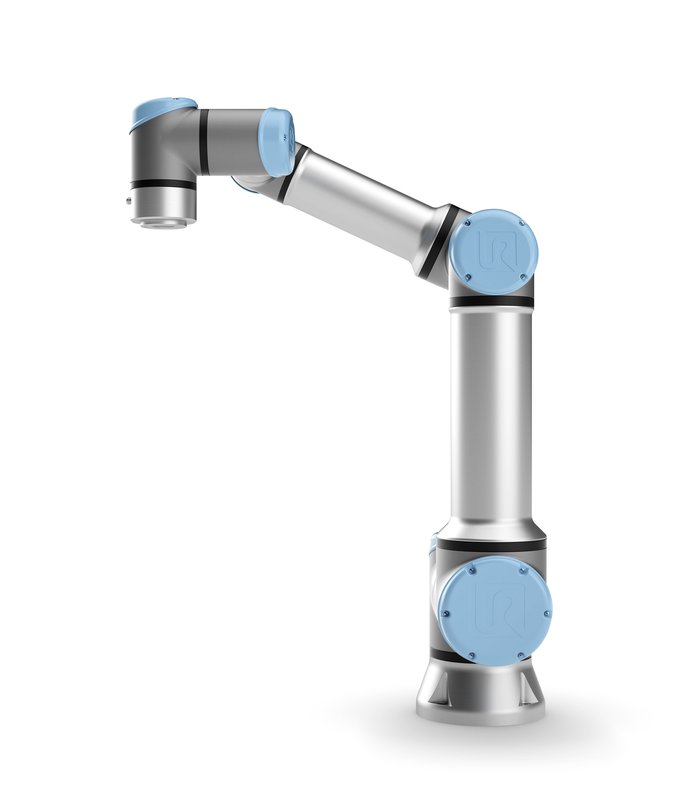
Dane techniczne
Specyfikacja
- Udźwig: 16 kg/ 35,3 lb
- Zasięg: 90 cm/35.4 in
- Stopnie swobody: 6 przegubów obrotowych DOF
- Programowanie: Graficzny interfejs użytkownika Polyscope na 12-calowym ekranie dotykowym, do zamontowania
Dane techniczne
Wydajność
- Zużycie energii, średnio maksymalne: 585 W
- Bezpuieczeństwo: 17 regulowanych funkcji bezpieczeństwa
- Certyfikaty: EN ISO13849-1, PLd Cat 3, EN ISO 10218-1
- Czujnik F/T-Siła, x-y-z:
- Zakres: 160 N;
- Rozdzielczość: 2.5 N;
- Dokładność: 5.5 N
- Czujnik F/T-Moment, x-y-z:
- Zakres: 10 Nm;
- Rozdzielczość: 0.4 Nm;
- Dokładność: 0.6 Nm
- Zakres temp.: 0-50°C
- Wilgotność (bez kondensacji): 90%RH
Ruch
- Powtarzalność: ±0,05 mm, z udźwigiem, per ISO 9283
- Ramię robotyczne z ruchem po osi:
- Podstawa: Zakres pracy: ± 360; Prędkość maksymalna: ±120°/sek.
- Ramię: Zakres pracy: ± 360; Prędkość maksymalna: ±120°/sek.
- Łokieć: Zakres pracy: ± 360; Prędkość maksymalna: ±180°/sek.
- Przegub 1: Zakres pracy: ± 360; Prędkość maksymalna: ±180°/sek.
- Przegub 2: Zakres pracy: ± 360; Prędkość maksymalna: ±180°/sek.
- Przegub 3: Zakres pracy: ± 360; Prędkość maksymalna: ±180°/sek.
- Typowa prędkość TCP: Prędkość maksymalna: 1 m/sek./39,4 in/sek
Cechy
- Klasyfikacja IP: IP54
- Klasa czystości pomieszczeń wg ISO: 5
- Hałas: <65 dB(A)
- Montowanie robota: Dowolny
- Porty wej./wyj.:
- Wejście cyfrowe 2;
- Wyjście cyfrowe 2;
- Wejście analogowe 2;
- Wyjście analogowe 0;
- Interfejs UART (9.6k-5Mbps)
- Zasilanie wej./wyj.w narzędziu:
- 12V/24V 600mA w pracy ciągłej,
- 2A w krótszych odstępach
Fizyczne
- Obrys: Φ 190 mm
- Materiały: Aluminium, plastik, stal
- Typ złącza narzędzia: M8 | M8 8-pin
- Długość przewodu ramienia robotycznego: 6 m/ 236 in
- Waga z przewodem: 33.1 kg/73 lbs
MODUŁ STEROWANIA
Cechy
- Klasyfikacja IP: IP44
- Klasa czystości pomieszczeń wg ISO: 6
- Zakres temperatur: 0-50°
- Porty wej./wyj.:
- Wejścia cyfrowe 16
- Wyjścia cyfrowe 16
- Wejścia analogowe 2
- Wyjścia analogowe 2
- Sterowanie 500 Hz, 4 szybkie oddzielne kwadraturowe wejścia cyfrowe
- Zasilanie wej./wyj.: 24V 2A
- Kominikacja:
- Częstotliwość sterowania: 500 Hz
- ModbusTCP: 500 Hz częstotliwość sygnału
- ProfiNet i EthernetIP: 500 Hz częstotliwość sygnału
- PostyUSB: 1 USB 2.0, 1 USB 3.0
- Źródło zasilania: 100-240VAC, 47-440 Hz
- Wilgotność: 90%RH (bez kondensacji)
Fizyczne
- Wielkość modułu sterowania (SxWxG): 475 x 423 x 268 mm
- Materiały: Stal
PILOT UCZENIA ROBOTA
Cechy
- Klasyfikacja IP: IP54
- Wilgotność: 90%RH (bez kondensacji)
- Rozdzielczość ekranu: 1280 x 800 px
Fizyczne
- Materiały: Plastik
- Waga wraz z 1m przewodem TP: 1.6/ 3.5 lb
- Długość przewodu: 4.5m/ 177.17 in